Seit heute ist mein Buch über die Forschungsgeschichte des autonomen Fahrens endlich in einer Softcover-Version erhältlich. Sie können es direkt hier auf der Website des Herausgebers (Springer) bestellen.
- Kröger, Fabian, From Automated to Autonomous Driving, A Transnational Research History on Pioneers, Artifacts and Technological Change (1950-2000), Springer, Cham 2024.
- Softcover ISBN: 978-3-031-49883-1
- Erscheinungsdatum: 3. April 2025
- Hardcover oder Softcover: EUR 137.14
- E-book: EUR 106.99
Einleitung
Dieses Buch stellt die wichtigsten Meilensteine der Forschung zum automatisierten und autonomen Fahren in den Vereinigten Staaten, Japan und Europa in fünf Jahrzehnten (1950-2000) vor. Anhand von Quellen aus der Automobilindustrie, der Elektrotechnik, der Robotik und der KI sowie aus militärischen Einrichtungen wird der Übergang vom Leitkabelansatz zu fahrzeugbasierten Sensor- und Bildverarbeitungssystemen nachgezeichnet. Das Buch gibt einen detaillierten Überblick über die technischen Konzepte, Artefakte, Forschungsfahrzeuge und Roboter und stellt die länderübergreifenden technischen Bemühungen vor, die lange vor dem Eintritt des Silicon Valley in dieses Gebiet begannen. Darüber hinaus geht das Buch auch auf die Rolle des Militärs im Bereich der Fahrzeugautomatisierung ein. Damit ist das Buch von großem Interesse für TechnikhistorikerInnen, PraktikerInnen in den Ingenieursdisziplinen, MobilitätswissenschaftlerInnen, JournalistInnen und politische EntscheidungsträgerInnen.

Forschungsgeschichte der Fahrzeugautomatisierung in den USA
Der erste Teil des Buches gibt einen historischen Überblick über die US-amerikanischen Forschungen zur Fahrzeugautomatisierung.
Das erste Kapitel behandelt die frühen Forschungen zur kabelgebundenen Fahrzeugführung durch RCA und GM in den 1950er Jahren und beschreibt die Experimente zum Automated Highway System der Ohio State University in den 1960er Jahren.
Im nächsten Kapitel wird die akademische Forschung zu mobilen Robotern seit den 1960er Jahren vorgestellt. Das Kapitel taucht in die Anfänge der künstlichen Intelligenz ein und liefert ein kurzes historisches Porträt der Defense Advanced Research Projects Agency (DARPA), bevor es den Beitrag der mobilen Roboter Stanford Cart und Shakey zum autonomen Fahren beschreibt.
Im nächsten Schritt werden die mobilen Roboter der Carnegie Mellon University vorgestellt, die in den 1980er Jahren zur Erforschung der visuellen Navigation entwickelt wurden. Die technischen Konzepte, Erfolge und Grenzen der verschiedenen NavLab-Roboterfahrzeuge werden diskutiert.
Die folgenden Kapitel befassen sich mit Projekten aus dem Verteidigungsbereich. Das Autonome Landfahrzeug (ALV) wird vorgestellt, wobei die technischen Spezifikationen, Fähigkeiten und Hindernisse des experimentellen Fahrzeugs detailliert beschrieben werden.
Im nächsten Kapitel wird das Demo I-III-Programm des US-Army Research Lab in den 1990er Jahren vorgestellt. Es hatte das Ziel, ferngesteuerte, halb- oder vollautonome unbemannte Bodenfahrzeuge (UGV) zu entwickeln, die ohne menschliche Anwesenheit an Bord operieren. Das letzte Kapitel befasst sich mit der Entwicklung von intelligenten Verkehrssystemen in den USA in der zweiten Hälfte der 1980er Jahre. Besonderes Augenmerk wird dabei auf das Forschungsprogramm Partners for Advanced Transit and Highways (PATH) in Kalifornien gelegt.
Forschungsgeschichte der Fahrzeugautomatisierung in Japan
Der zweite Teil des Buches bietet einen historischen Überblick über die Forschung zur Fahrzeugautomatisierung in Japan. Nach einer Einführung in die japanische Industriepolitik und den Beginn der Massenmotorisierung nach dem Zweiten Weltkrieg werden in mehreren Kapiteln die ersten Experimente zum automatisierten Fahren unter Verwendung von Leitkabeln beschrieben, die 1961 vom Government Mechanical Laboratory in Higashi-Murayama begonnen wurden.
Nach einem Kapitel über ein schienengestütztes computergesteuertes Fahrzeugsystem (CVS) werden im folgenden Kapitel die Forschungsarbeiten des Mechanical Engineering Laboratory (MEL) vorgestellt, das in den 1970er Jahren das weltweit erste visuell gesteuerte Automobil, das so genannte Intelligent Vehicle, entwickelte. Ein Toyota Crown wurde mit TV-Kameras ausgestattet, die seitlich Leitplanken erkannten. Das Fahrzeug funktionierte ohne Änderungen an der Straßeninfrastruktur und ohne Off-Board-Computer.
Im nächsten Kapitel werden die groß angelegten Demonstrationen von intelligenten Verkehrssystemen (ITS) in Japan ab Mitte der 1980er Jahre beschrieben. Ein Versuchsfahrzeug mit maschinellem Sehen, das Personal Vehicle System (PVS), wurde 1987 vom MITI entwickelt. Es fuhr autonom auf geraden Strecken und nutzte Kameras, Lidar und Ultraschall zur Erkennung von Fahrspuren und Hindernissen. Das Bauministerium initiierte 1995 ein Automated Highway System (AHS)-Programm, das zur ersten japanischen AHS-Demonstration führte. Das Verkehrsministerium startete 1991 das Advanced Safety Vehicle-Projekt, das sich auf fahrzeugbasierte Sensorik und aktive Sicherheitsassistenzsysteme konzentriert. Dieser Trend zu fahrzeugbasierten Automatisierungskonzepten führte zu mehreren Demonstrationen. Das Ende des Kapitels ist einem Projekt der japanischen Automobilindustrie gewidmet.
Forschungsgeschichte der Fahrzeugautomatisierung in Europa
Der dritte Teil des Buches beginnt mit den frühen Experimenten zum automatisierten Fahren in Europa: Er stellt die Leitkabelforschung des Road Research Laboratory in England, das halbautomatische Versuchsfahrzeug von Continental und Siemens (1968) und die mit einem Leitdraht gesteuerten Lkw von MAN und Bosch (1971) in Deutschland vor. Auch Peugeot nutzte Führungsseile für die Erprobung von Fahrzeugen.
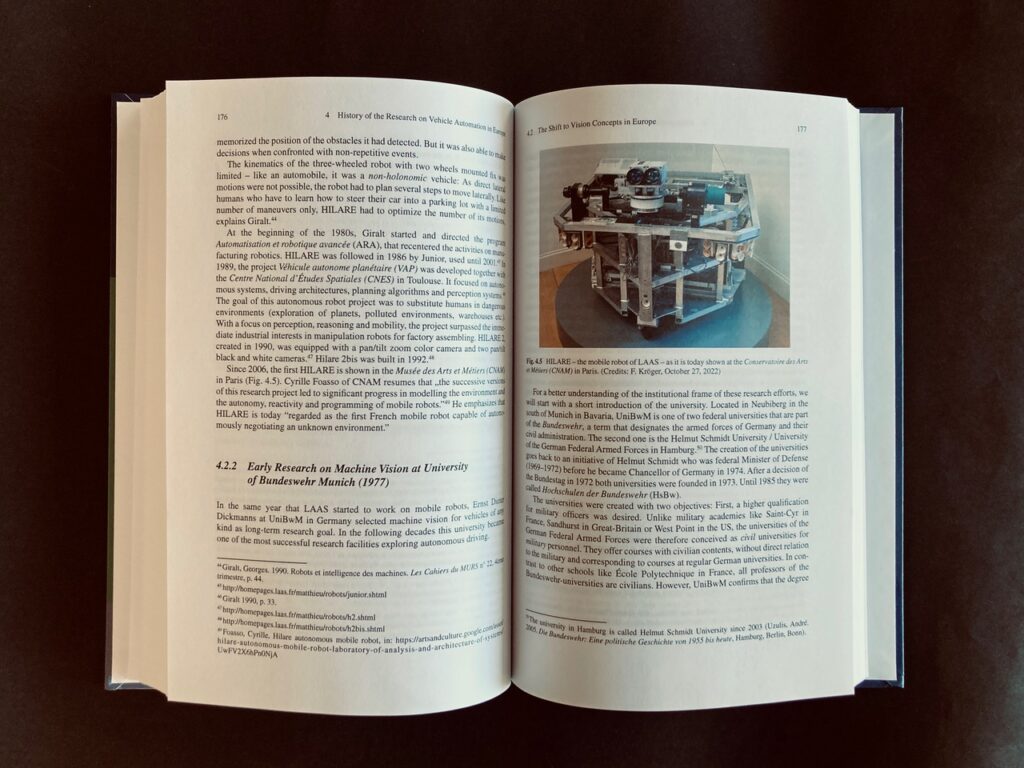
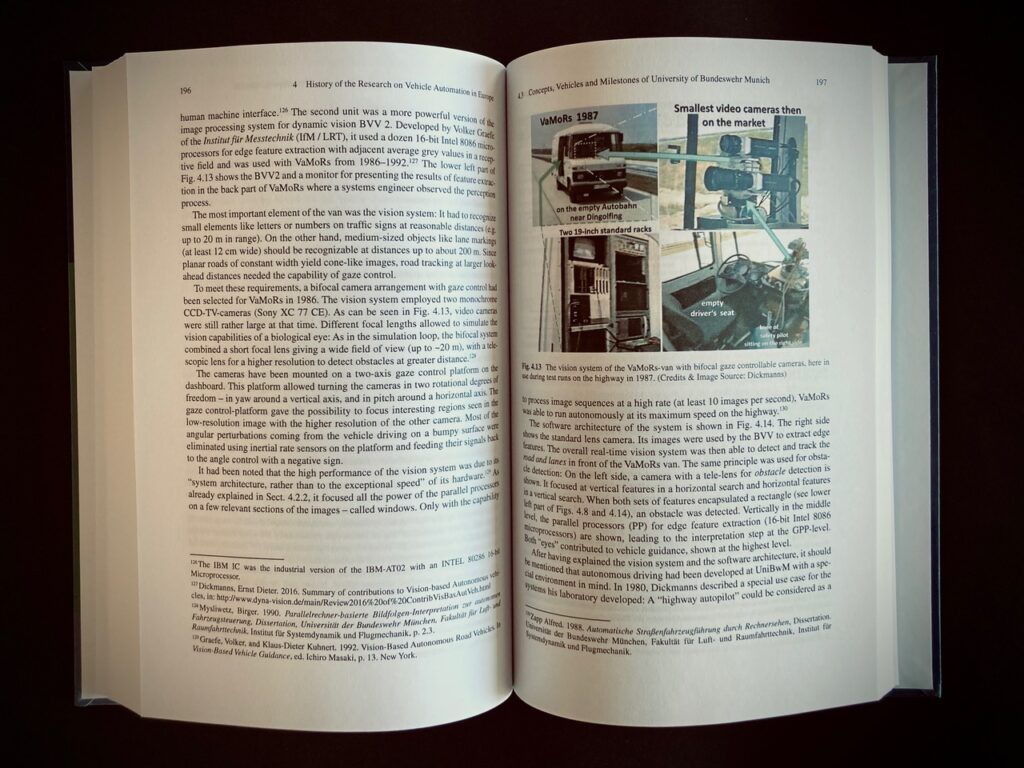
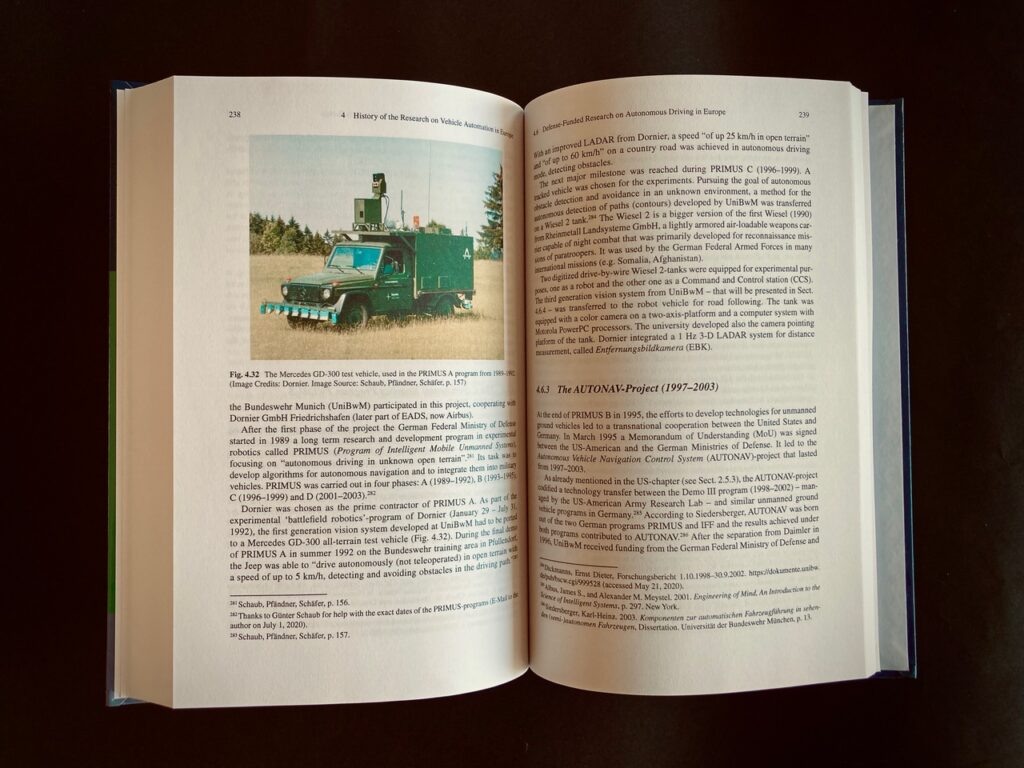
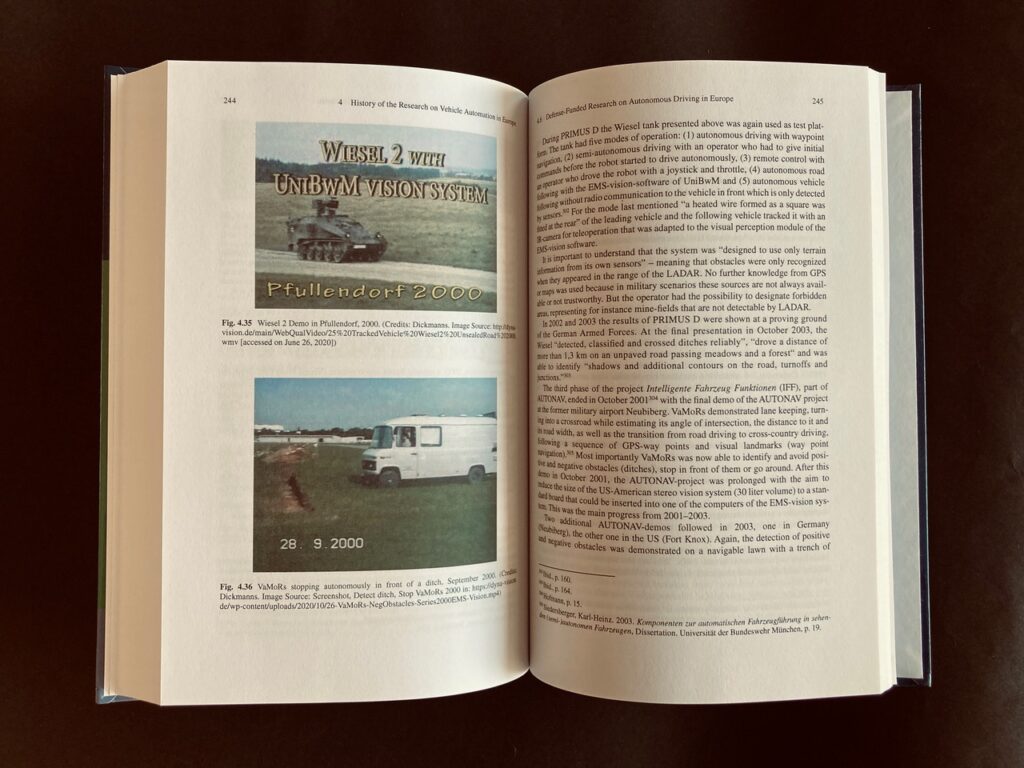
Das nächste Kapitel befasst sich mit der Umstellung auf Sehsysteme in Europa Ende der 1970er Jahre. Es umfasst den mobilen Roboter HILARE in Frankreich und Experimente mit dynamischem maschinellem Sehen an der UniBwM in Deutschland. Auch Experimente der Automobilindustrie zur visuellen Steuerung werden vorgestellt (Volkswagen Opto-Pilot). Das nächste Kapitel ist den Konzepten, Forschungsfahrzeugen und Meilensteinen der UniBwM in Deutschland gewidmet, insbesondere den Testfahrten mit VaMoRs und dem 4-D Ansatz von Ernst Dieter Dickmanns. Einem Kapitel über das PROMETHEUS-Programm der Europäischen Union, in dem die Leistungen der Forschungsfahrzeuge VITA-II und VaMP beschrieben werden, folgt ein Porträt der Projekte Praxitèle, Cycab und La Route Automatisée (LaRA) in Frankreich sowie der Langstreckenfahrten von VaMP und ARGO in den Jahren 1995 und 1998. Das nächste Kapitel befasst sich mit der vom Militär finanzierten Forschung zum autonomen Fahren in Europa. Beginnend mit dem französischen Militärprojekt DARDS wird das experimentelle Robotikprogramm PRIMUS in Deutschland zusammen mit der AutoNav-Vereinbarung (1997-2003) und dem Vision-System der dritten Generation (EMS) des UniBwM vorgestellt.
Ergebnisse
In diesem Kapitel werden die Ergebnisse unserer Studie vorgestellt: Sie kommt zu dem Schluss, dass das automatisierte und autonome Fahren nicht einem einzigen Erfinder, sondern vielen Pionieren in den drei Regionen zugeschrieben werden kann. Der globale Überblick zeigt, dass zwei Ansätze unterschieden werden können, von denen der erste hauptsächlich auf der Infrastruktur und der zweite eher auf dem Fahrzeug basiert. Ein Vergleich der Forschungsanstrengungen in den drei Regionen zeigt Gemeinsamkeiten und Unterschiede, gleichzeitige und nicht gleichzeitige Ereignisse. Es werden länderübergreifende historische Paradigmen, Verschiebungen oder Wendepunkte um Schlüsseljahre herum identifiziert.
Die historischen Perioden begannen mit Führungskabeln und mobilen Robotern (1950-1960), einer Verlagerung zu Ansätzen des maschinellen Sehens (1970er Jahre), der Entwicklung digitaler On-Board-Computer und einer Renaissance von Infrastrukturkonzepten (1980er Jahre) und schließlich einem Trend zu großen Demos zusammen mit einer Verlagerung zu Assistenzsystemen und militärischen Projekten (1990er Jahre). Auch wenn ein direkter Vergleich der verschiedenen Roboterfahrzeuge schwierig ist, so lässt sich doch ein gemeinsamer historischer Trend erkennen – von Indoor-Fahrten mit Offboard-Computern zu Outdoor-Fahrten mit Onboard-Computern. Nach einer Diskussion über die Rolle des Hardware-Fortschritts werden ein historischer Zeitstrahl und mögliche Lehren aus der Geschichte vorgestellt.
Chronologie mit „firsts“, „milestones“ und Übergängen
Am Ende des Buches finden Sie eine Zeitleiste zur Geschichte des automatisierten und autonomen Fahrens von den 1930er Jahren bis ins Jahr 2000 in den Vereinigten Staaten, Japan und Europa. Sie umfasst Ereignisse aus dem Bereich der künstlichen Intelligenz und der Robotik, der Elektronik- und Automobilindustrie sowie Aktivitäten des Militärs und von Regierungsstellen.