Aujourd’hui, mon livre sur l’histoire de la recherche consacrée à la conduite autonome est enfin disponible en version souple. Vous pouvez le commander directement ici sur le site de l’éditeur (Springer).
- Kröger, Fabian, From Automated to Autonomous Driving, A Transnational Research History on Pioneers, Artifacts and Technological Change (1950-2000), Springer, Cham 2024.
- Softcover ISBN: 978-3-031-49883-1
- Publié: 3 April 2025
- Prix Hardcover / Softcover: EUR 137.14
- E-book: EUR 106.99
Introduction
Cet ouvrage présente les principales étapes de la recherche sur la conduite automatisée et autonome aux États-Unis, au Japon et en Europe au cours de cinq décennies (1950-2000). S’appuyant sur des sources provenant de l’industrie automobile, de l’ingénierie électrique, du domaine de la robotique et de l’intelligence artificielle, ainsi que d’institutions militaires, il retrace la transition entre l’approche du câble de guidage et les systèmes de capteurs / caméras basés sur le véhicule.
En donnant un aperçu détaillé des concepts techniques, des artefacts, des véhicules de recherche et des robots, le livre présente les efforts d’ingénierie transnationaux qui ont commencé bien avant que la Silicon Valley n’entre dans le domaine. En outre, le livre détaille de manière unique le rôle du militaire dans le domaine de l’automatisation des véhicules. Tous ces éléments font que ce livre présente un grand intérêt pour les historiens de la technologie, les praticiens des disciplines d’ingénierie, les chercheurs travaillant sur les études de mobilité, les journalistes et les décideurs politiques.

Histoire de la recherche sur l’automatisation des véhicules au États-Unis
La première partie du livre donne un aperçu historique de la recherche sur l’automatisation des véhicules aux États-Unis.
Elle commence par les premières recherches sur le guidage des véhicules par câble menées par RCA et GM dans les années 1950 et détaille les expériences sur le système routier automatisé menées par l’université de l’État de l’Ohio dans les années 1960.
Le chapitre suivant présente la recherche universitaire sur les robots mobiles depuis les années 1960. Plongeant dans les débuts de l’intelligence artificielle et dressant un bref portrait historique de la Defense Advanced Research Projects Agency (DARPA), le chapitre détaille ensuite la contribution des robots mobiles Stanford Cart et Shakey à la conduite autonome.
Dans un deuxième temps, les robots mobiles de l’Université Carnegie Mellon, développés dans les années 1980 pour explorer la navigation visuelle, sont présentés. Les concepts techniques, les succès et les limites des différents véhicules-robots du NavLab sont discutés.
Les chapitres suivants s’intéressent aux projets liés à la défense. Le véhicule terrestre autonome (ALV) est présenté, détaillant les spécifications techniques, les capacités et les obstacles du véhicule expérimental.
Le chapitre suivant présente le programme Demo I-III du laboratoire de recherche de l’armée américaine dans les années 1990. Il avait pour objectif de développer des véhicules terrestres sans pilote (UGV) télécommandés, semi-autonomes ou entièrement autonomes, fonctionnant sans présence humaine à bord. Le dernier chapitre est consacré au développement des systèmes de transport intelligents aux États-Unis au cours de la seconde moitié des années 1980. L’accent est mis sur le programme de recherche Partners for Advanced Transit and Highways (PATH) en Californie.
Histoire de la recherche sur l’automatisation des véhicules au Japon
La deuxième partie du livre donne un aperçu historique de la recherche sur l’automatisation des véhicules au Japon. Après une introduction sur la politique industrielle japonaise et le début de la motorisation de masse après la Seconde Guerre mondiale, plusieurs chapitres détaillent les premières expériences sur la conduite automatisée à l’aide de câbles de guidage qui ont été lancées en 1961 par le Laboratoire mécanique du gouvernement à Higashi-Murayama.
Après un chapitre sur un système de véhicule contrôlé par ordinateur (CVS) basé sur le rail, le chapitre suivant présente les recherches du Laboratoire d’ingénierie mécanique (MEL) qui a développé dans les années 1970 la première automobile au monde basée sur la vision, appelée véhicule intelligent. Une Toyota Crown était équipée de caméras de télévision qui détectaient les glissières de sécurité latérales. Elle fonctionnait sans modification de l’infrastructure routière et sans informatique embarquée.
Le chapitre suivant détaille les démonstrations à grande échelle des systèmes de transport intelligents (ITS) au Japon après le milieu des années 1980. Un véhicule expérimental doté d’un système de vision artificielle, appelé Personal Vehicle System (PVS), a été créé par le MITI en 1987. Il se déplaçait de manière autonome sur des lignes droites en utilisant des caméras, un lidar et des ultrasons pour la détection des voies et des obstacles. Le ministère de la construction a lancé en 1995 un programme de système autoroutier automatisé (AHS), qui a débouché sur la première démonstration japonaise d’AHS. Le ministère des transports a lancé en 1991 le projet « Advanced Safety Vehicle », axé sur les systèmes de détection et d’assistance à la sécurité active basés sur les véhicules. Cette tendance aux concepts d’automatisation basés sur les véhicules a donné lieu à plusieurs démonstrations. La fin du chapitre est consacrée à un projet de l’industrie automobile japonaise.
Histoire de la recherche sur l’automatisation des véhicules en Europe
La troisième partie de l’ouvrage commence par les premières expériences de conduite automatisée en Europe : elle présente les recherches sur les câbles de guidage du Road Research Laboratory en Angleterre, le véhicule d’essai semi-automatisé de Continental et Siemens (1968) et les camions guidés par câble de MAN et Bosch (1971) en Allemagne. Peugeot a également utilisé des câbles de guidage pour tester ses véhicules.
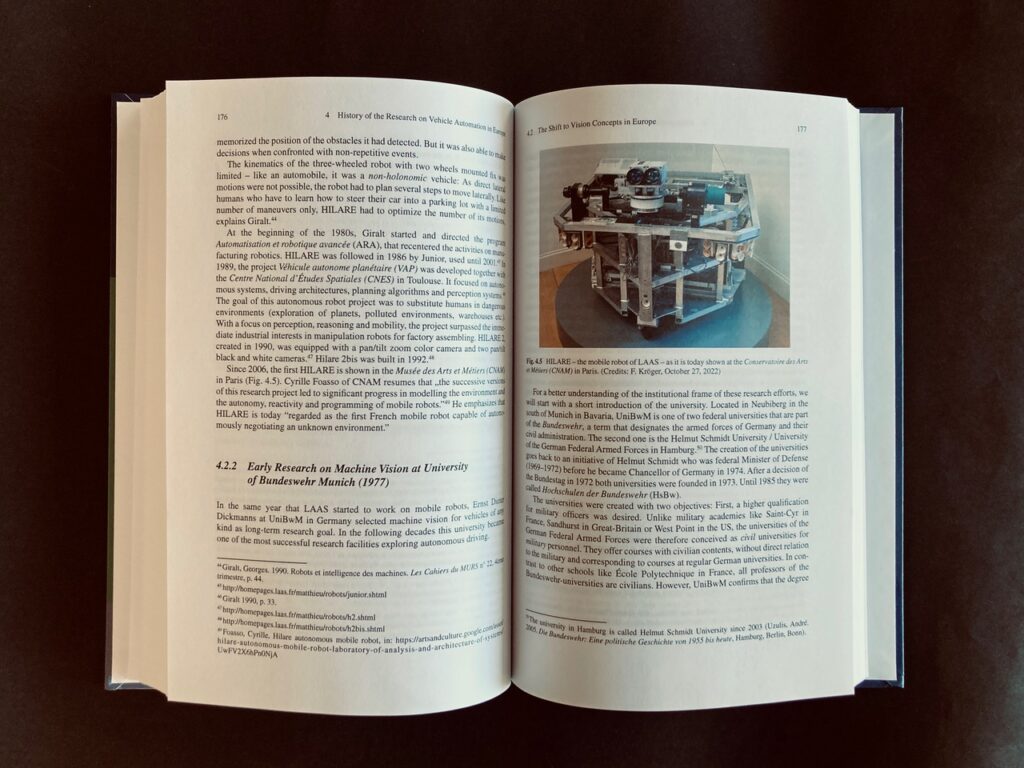
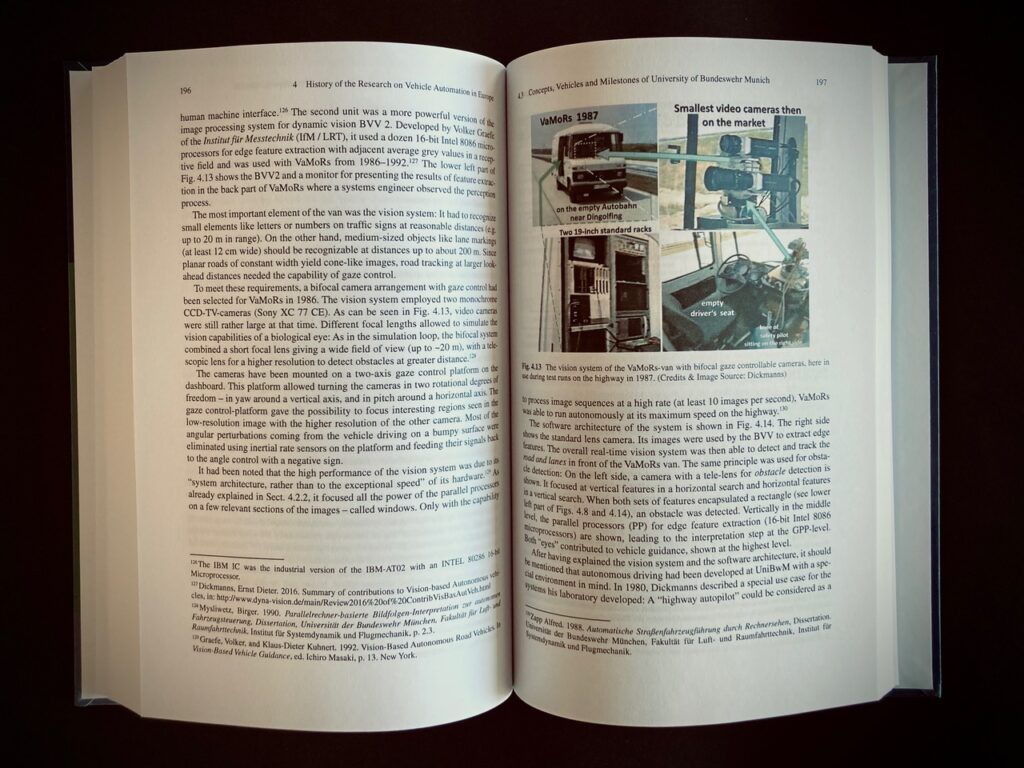
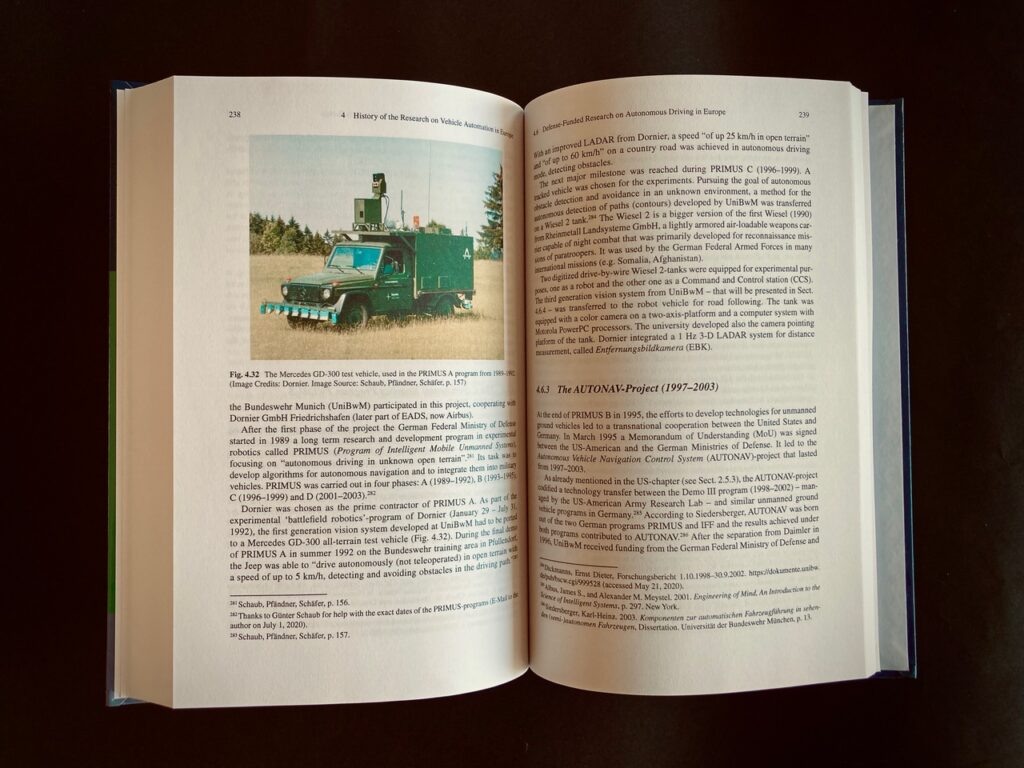
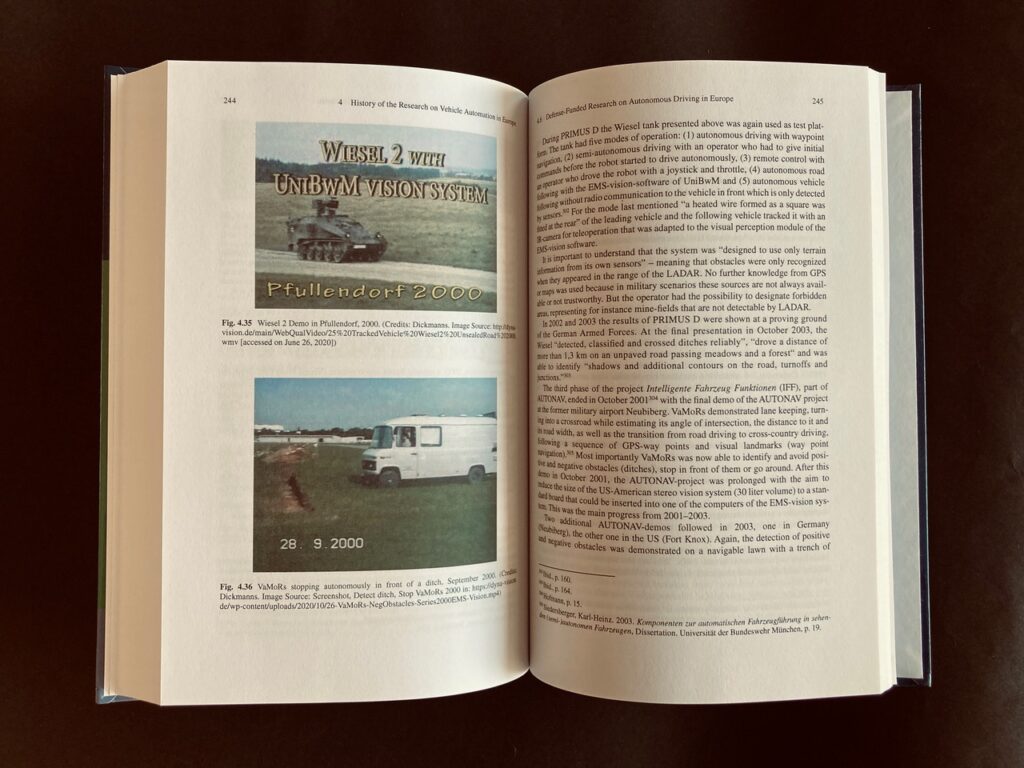
Le chapitre suivant présente le passage aux systèmes de vision en Europe à la fin des années 1970. Il inclut le robot mobile HILARE en France et les expériences de vision industrielle dynamique à l’UniBwM en Allemagne. Les expériences de l’industrie automobile en matière de guidage visuel sont également présentées (Volkswagen Opto-Pilot). Le chapitre suivant est consacré aux concepts, aux véhicules de recherche et aux étapes importantes de l’UniBwM en Allemagne, en particulier les essais de conduite avec le VaMoRs et l’approche 4D d’Ernst Dieter Dickmanns. Un chapitre sur le programme PROMETHEUS de l’Union européenne, détaillant les performances des véhicules de recherche VITA-II et VaMP, est suivi d’un portrait des projets Praxitèle, Cycab et La Route Automatisée (LaRA) en France et des trajets longue distance de VaMP et ARGO en 1995 et 1998. Le chapitre suivant explore la recherche sur la conduite autonome financée par la domaine de la défense en Europe. En commençant par le projet militaire français DARDS, le programme robotique expérimental PRIMUS en Allemagne est présenté, ainsi que l’accord AutoNav (1997-2003) et le système de vision de troisième génération (EMS) de l’UniBwM.
Résultats de l’enquête
Ce chapitre présente les résultats de notre étude : Il conclut que la conduite automatisée et autonome ne peut être attribuée à un seul inventeur, mais à de nombreux pionniers dans les trois régions. L’aperçu global montre que deux approches peuvent être distinguées, la première basée principalement sur l’infrastructure, la seconde davantage sur le véhicule. Une comparaison des efforts de recherche dans les trois régions est présentée, montrant les éléments communs et les différences, les événements simultanés et non simultanés. Des paradigmes historiques transnationaux, des changements ou des tournants autour d’années charnières sont identifiés.
Les périodes historiques ont commencé avec les câbles de guidage et les robots mobiles (1950-1960), un passage à des approches de vision artificielle (1970), le développement de l’informatique numérique embarquée et une renaissance des concepts d’infrastructure (1980), et enfin une tendance aux grandes démonstrations ainsi qu’un passage à des systèmes d’assistance et à des projets militaires (1990). Bien qu’il soit difficile de comparer directement les différents véhicules robotisés, une tendance historique commune est identifiée : des parcours en intérieur avec des ordinateurs embarqués aux parcours en extérieur avec des ordinateurs embarqués. Après avoir examiné le rôle du progrès matériel, une chronologie et les leçons possibles de l’histoire sont présentées.
Chronologie avec des « firsts, milestones » et transitions
A la fin du livre, vous trouverez une chronologie qui présente les événements les plus importants de l’histoire de la conduite automatisée et autonome des années 1930 aux années 2000, couvrant les États-Unis, le Japon et l’Europe. Elle inclut des événements dans le domaine de la recherche en intelligence artificielle et en robotique, dans l’industrie électronique et automobile et dans les activités des agences militaires et gouvernementales.