Today, my book on the research history of autonomous driving is finally available in a softcover version. You can order it directly here on the website of the editor (Springer).
- Kröger, Fabian, From Automated to Autonomous Driving, A Transnational Research History on Pioneers, Artifacts and Technological Change (1950-2000), Springer, Cham 2024.
- Softcover ISBN: 978-3-031-49883-1
- Date: 03 April 2025
- Hardcover or Softcover: EUR 137.14
- E-book: EUR 106.99
Introduction
This book presents the most important milestones of the research on automated and autonomous driving in the United States, Japan and Europe throughout five decades (1950-2000). Drawing on sources from the automotive industry, electrical engineering, the robotics and AI-domain and military institutions, it retraces the transition from the guidance-cable approach to vehicle-based sensor and vision systems. Giving a detailed overview of the technical concepts, artefacts, research vehicles and robots, the book presents the transnational engineering efforts that started long before Silicon Valley entered the field. In addition, the book also uniquely details the role of the military in the domain of vehicle automation. This all ensures the book is of great interest to historians of technology, practitioners in engineering disciplines, scholars working in mobility studies, journalists, and political decision makers.

History of the Research on Vehicle Automation in the United States
The first part of the book provides an historical overview of the research on vehicle automation in the United States.
It starts with the early research on cable-based vehicle guidance by RCA and GM in the 1950s and details the Automated Highway System experiments of Ohio State University during the 1960s.
The next chapter presents the academic research on mobile robots since the 1960s. Diving into the early days of artificial intelligence and providing a short historical portrait of the Defense Advanced Research Projects Agency (DARPA) the chapter then details the contribution of the mobile robots Stanford Cart and Shakey for autonomous driving.
In the next step, the mobile robots of Carnegie Mellon University, developed in the 1980s to explore visual navigation, are presented. The technical concepts, successes and limits of the different NavLab-robot vehicles are discussed.
The following chapters are interested in defense-related projects. The Autonomous Land Vehicle (ALV) is presented, detailing the technical specifications, capabilities and hindrances of the experimental vehicle.
The next chapter presents the Demo I-III program of the US-Army Research Lab in the 1990s. It had the goal to develop remotely controlled, semi- or fully autonomous Unmanned Ground Vehicles (UGV), operating without human presence on-board. The last chapter focuses on the development of Intelligent Transportation Systems in the US during the second half of the 1980s. Special emphasis is given to the research program Partners for Advanced Transit and Highways (PATH) in California.
History of the Research on Vehicle Automation in Japan
The second part of the book provides an historical overview of the research on vehicle automation in Japan. After an introduction to the Japanese industrial policy and the beginning mass motorization after WWII, several chapters detail the first experiments on automated driving using guidance cables that were started in 1961 by the Government Mechanical Laboratory in Higashi-Murayama.
After a chapter about a rail-based Computer Controlled Vehicle System (CVS), the following chapter presents the research of the Mechanical Engineering Laboratory (MEL) that developed in the 1970s the worlds first vision-based automobile, called Intelligent Vehicle. A Toyota Crown was equipped with TV-cameras that detected lateral guard rails. It functioned without modification of the road infrastructure and without off-board computing.
The next chapter details the large-scale demonstrations of Intelligent Transport Systems (ITS) in Japan after the mid-1980s. An experimental vehicle with machine vision, called Personal Vehicle System (PVS) had been created by MITI in 1987. It ran autonomously along straight lines using cameras, lidar and ultrasonic for lane and obstacle detection. The Ministry of Construction initiated in 1995 an Automated Highway System (AHS)-program, leading to the first Japanese AHS-demonstration. The Ministry of Transport launched in 1991 the Advanced Safety Vehicle-project, focusing on vehicle based sensing and active safety assistance systems. This trend to vehicle-based automation concepts led to several demos. The end of the chapter is dedicated to a project of the Japanese automotive industry.
History of the Research on Vehicle Automation in Europe
The third part of the book begins with the early experiments on automated driving in Europe: It presents the guidance-cable research of the Road Research Laboratory in England, the semi-automated test-vehicle of Continental and Siemens (1968) and the guide-wire directed trucks of MAN and Bosch (1971) in Germany. Peugeot also used guidance-cables to test vehicles.
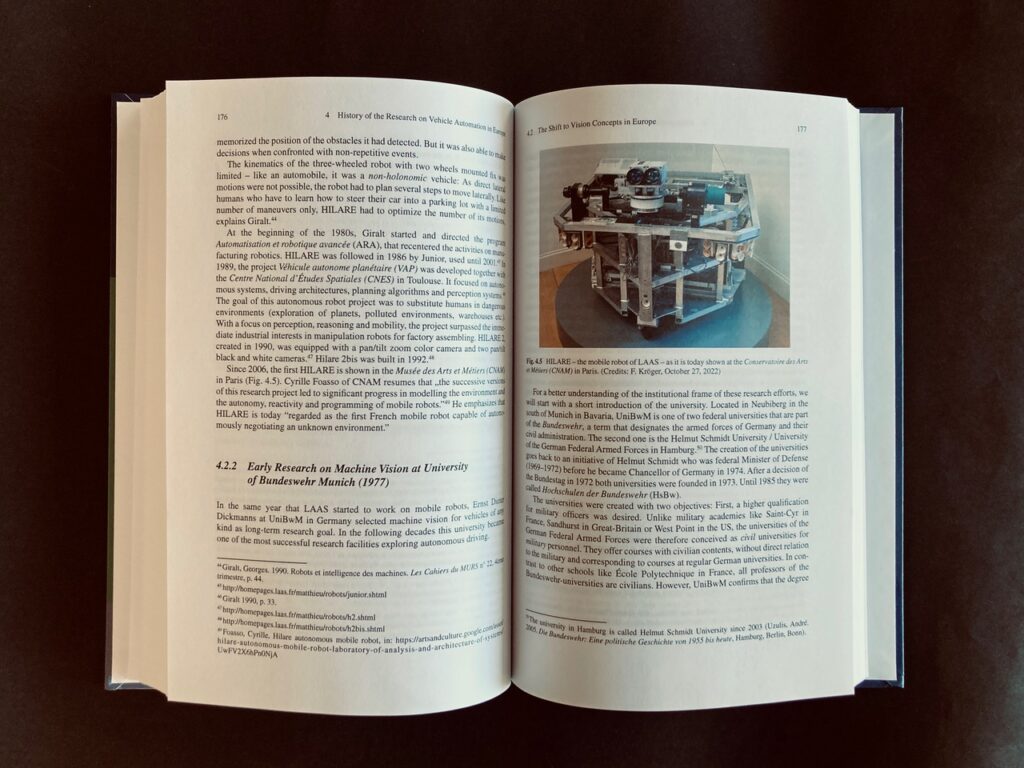
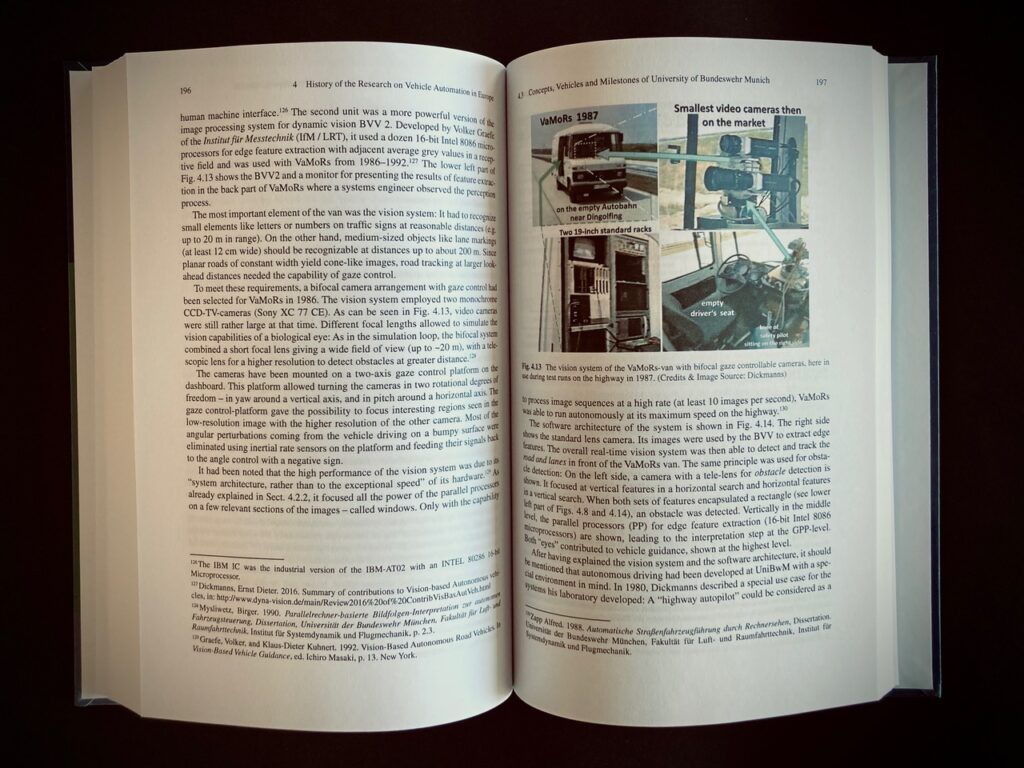
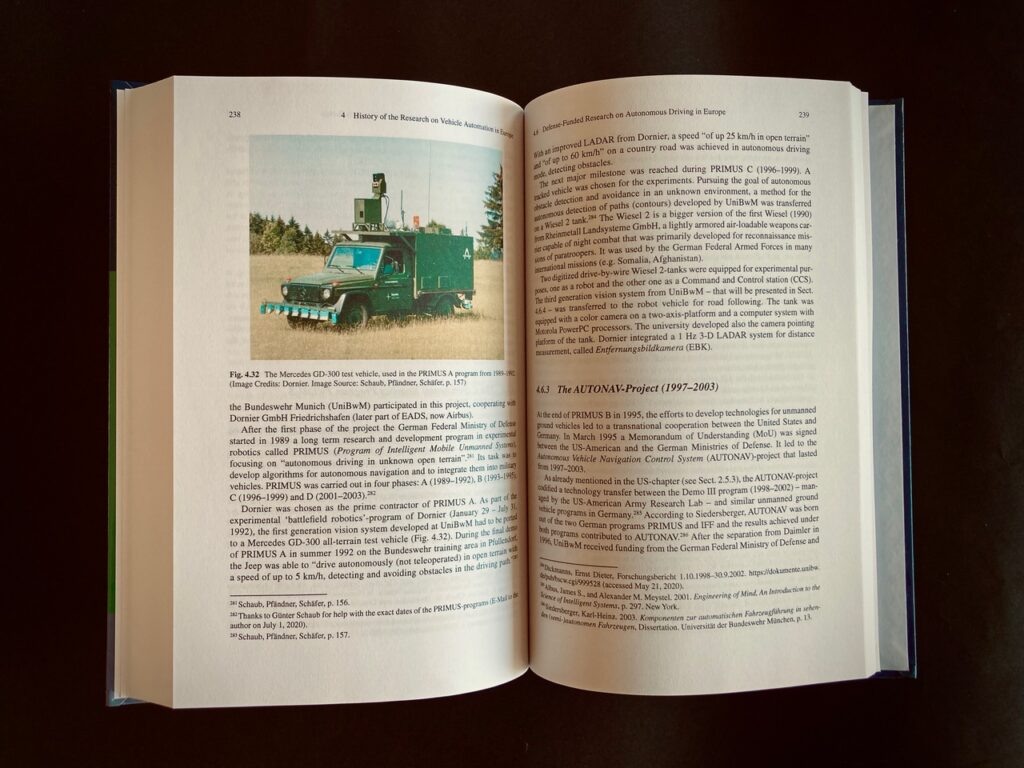
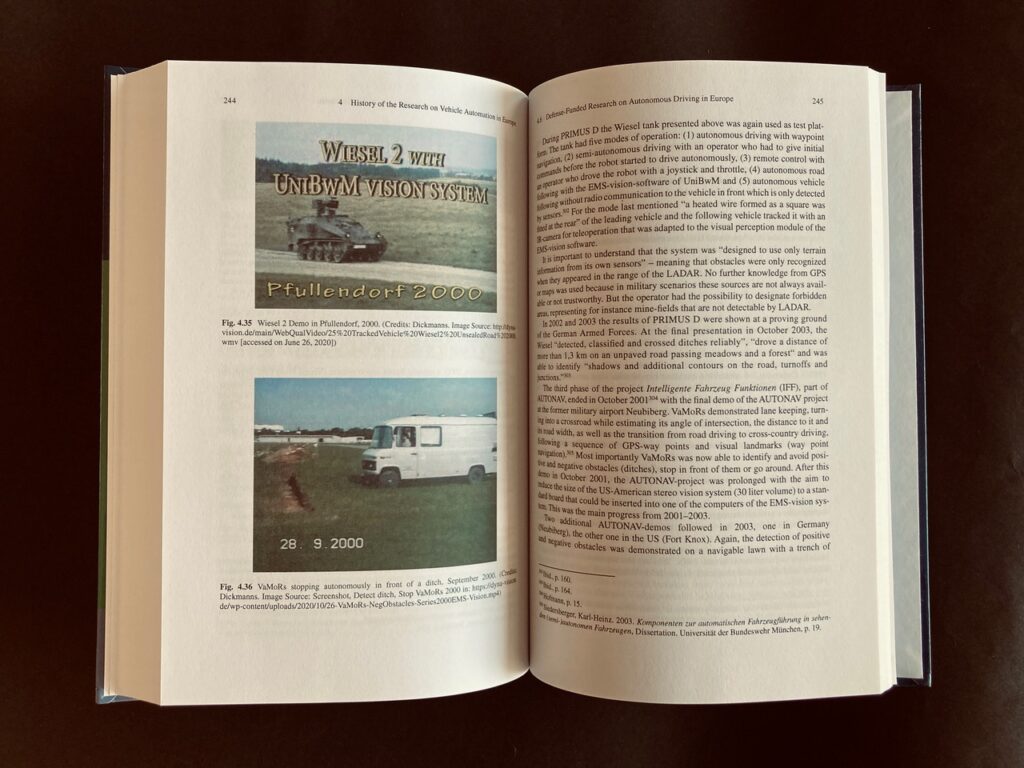
The next chapter presents the shift to vision systems in Europe at the end of the 1970s. It includes the mobile robot HILARE in France and experiments with dynamic machine vision at UniBwM in Germany. Experiments of the automotive industry in visual guidance experiments are also presented (Volkswagen Opto-Pilot). The next chapter is dedicated to the concepts, research vehicles and milestones of UniBwM in Germany, especially the test-drives with VaMoRs and the 4-D approach of Ernst Dieter Dickmanns. A chapter about the PROMETHEUS-program of the European Union, detailing the performances of the research vehicles VITA-II and VaMP, is followed by a portrait of the projects Praxitèle, Cycab and La Route Automatisée (LaRA) in France and the long-distance drives of VaMP and ARGO in 1995 and 1998. The next chapter explores the defense funded research on autonomous driving in Europe. Starting with the French military project DARDS, the experimental robotics-program PRIMUS in Germany is presented together with the AutoNav-agreement (1997-2003) and the third-generation vision system (EMS) of UniBwM.
Findings of the Inquiry
This chapter presents the findings of our study: It concludes that automated and autonomous driving can’t be attributed to a single inventor but many pioneers in the three regions. The global overview shows that two approaches can be distinguished, the first mainly based on the infrastructure, the second more on the vehicle. A comparison of the research efforts in the three regions is given, showing common elements and differences, simultaneous and non-simultaneous events. Transnational historical paradigms, shifts or turning points around pivotal years are identified.
The historical periods started with guidance cables and mobile robots (1950–1960), a shift to machine vision approaches (1970s), the development of digital on-board computing and a renaissance of infrastructure concepts (1980s), and finally a trend to big demos together with a shift to assistance systems and military projects (1990s). While a direct comparison of the different robot vehicles remains difficult, a common historical trend is identified – from indoor runs with offboard computers to outdoor runs with onboard computers. After discussing the role of hardware progress, a historical timeline and possible lessons of history are presented.
Timeline with Firsts, Milestones and Shifts
This timeline presents the most important events in the history of automated and autonomous driving from 1939 to 2003, covering the United States, Japan and Europe. It includes events in the domain of artificial intelligence and robotics research, the electronics and automobile industry and activities of the military and governmental agencies.